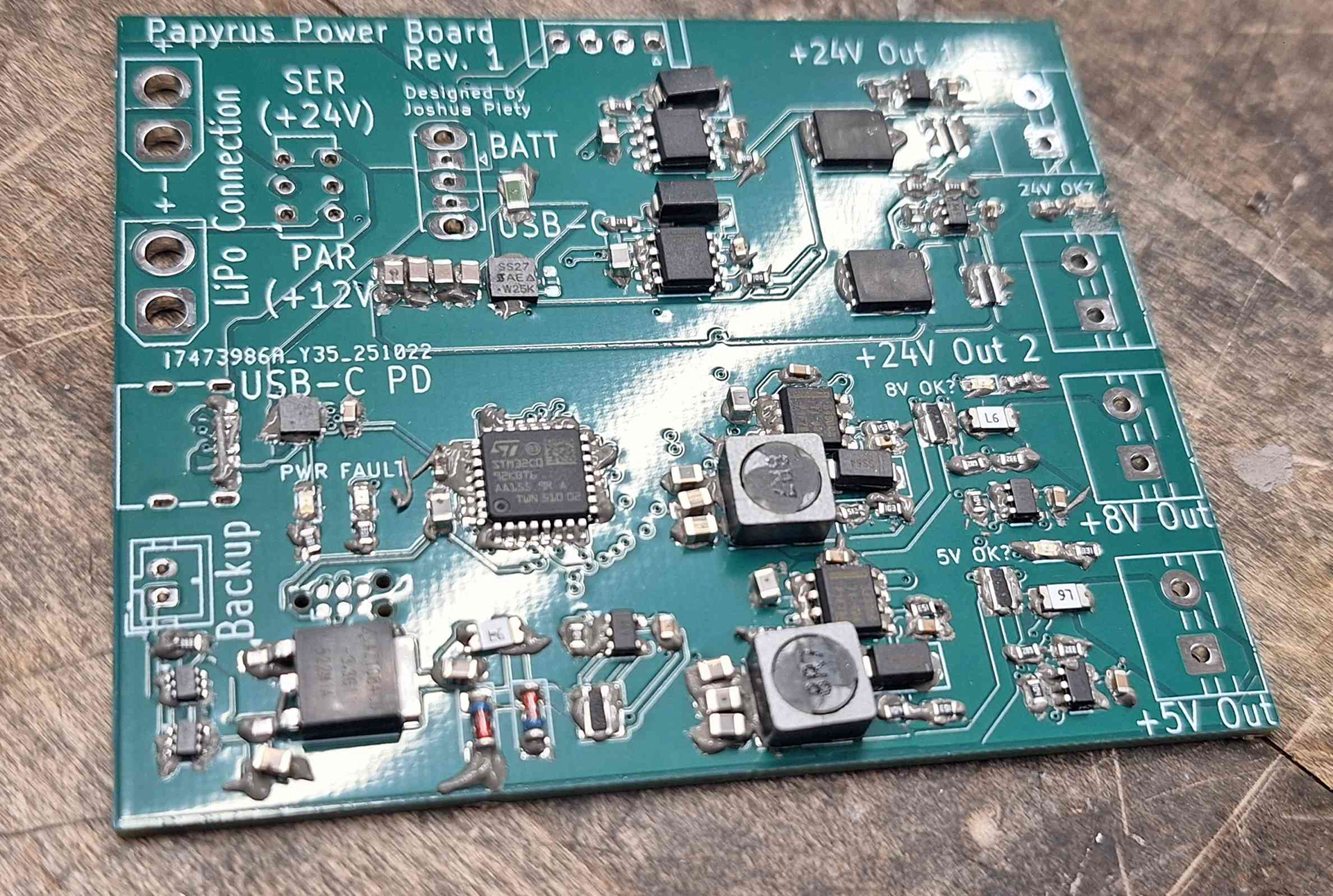
The first revision of the Papyrus Power Board, just before automated reflow soldering. Features include two high current high-side driven outputs, two high-current buck regulators, automatic input switching, current & voltage monitoring, protection circuitry, and an STM32 microcontroller at the heart.

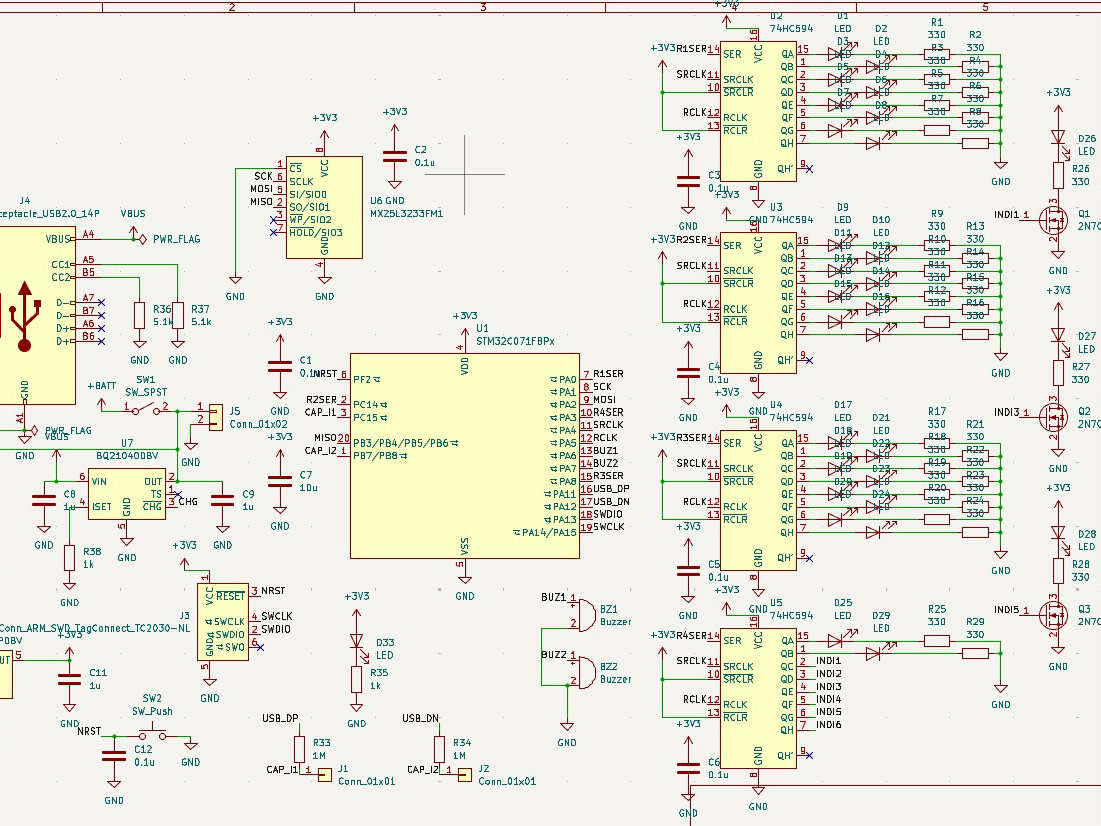
Design and layout of all boards in the Papyrus system was done using KiCAD.
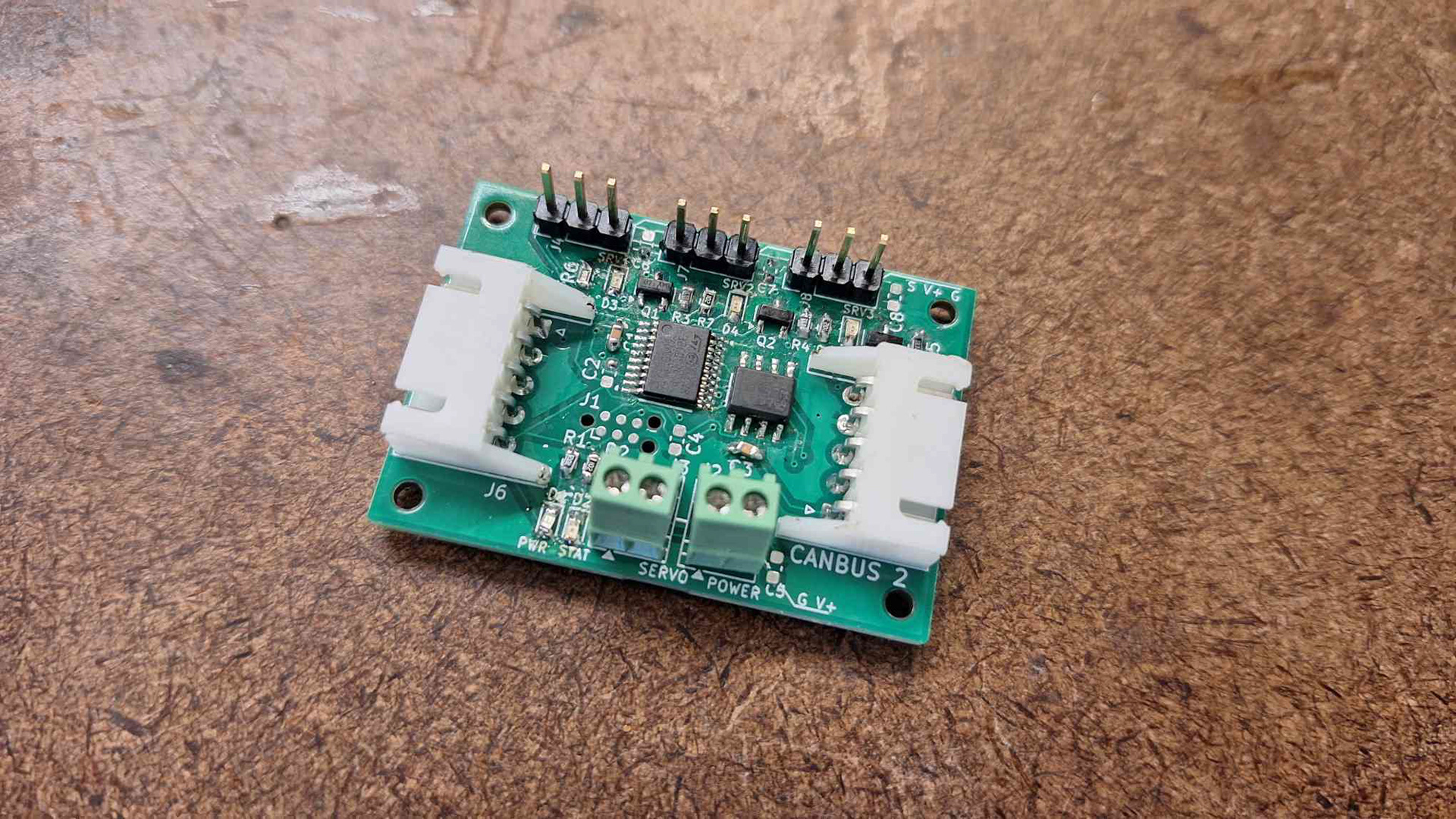
Small interchangeable controller boards like this one (for servo-actuated valves) were designed to be simple and cost effective, and could be stacked arbitrarily using a Controller Area Network bus.
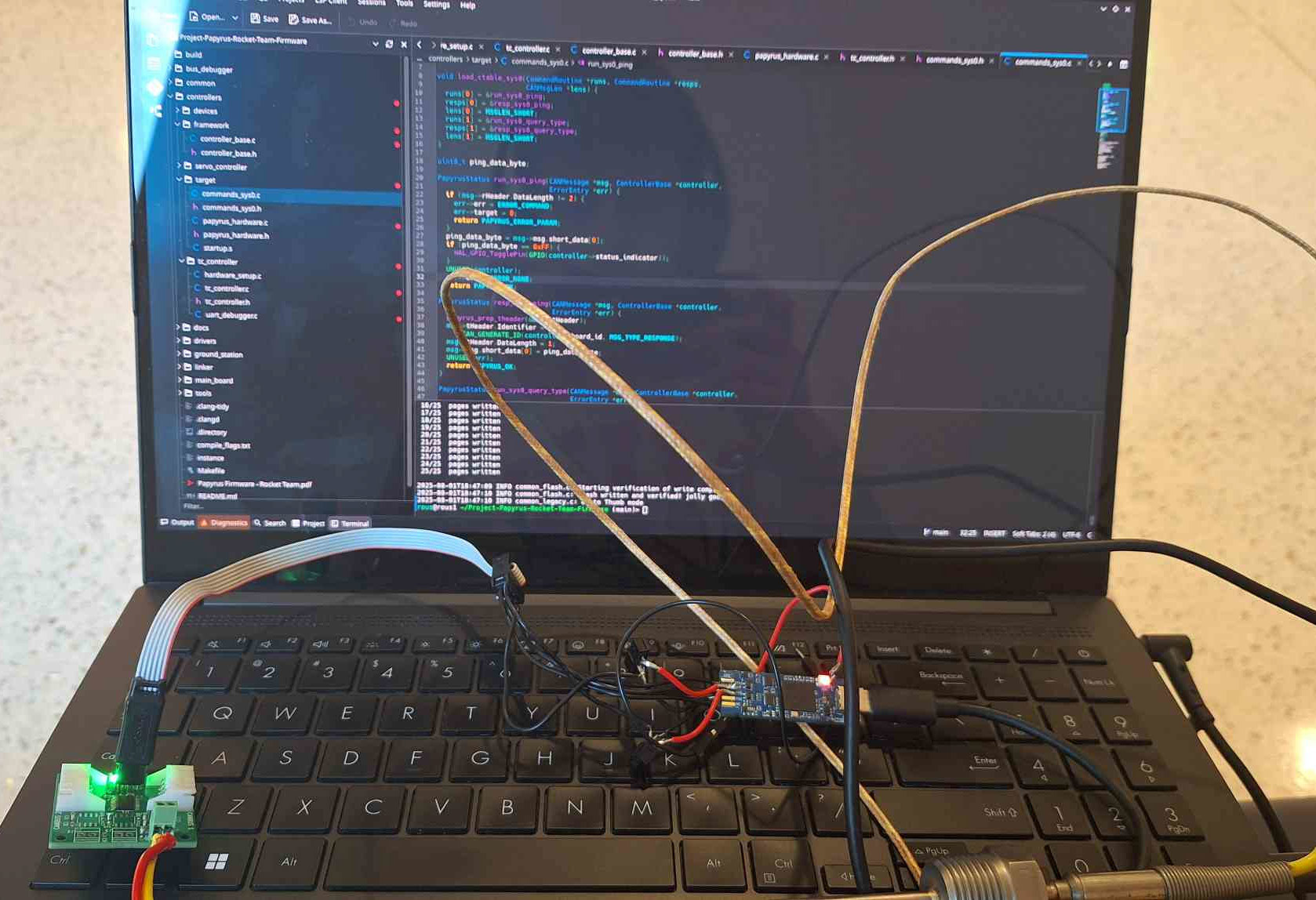
The firmware stack for Papyrus was developed using C and STM32 HAL headers. Configuration was generated using STM32CubeMX tools.
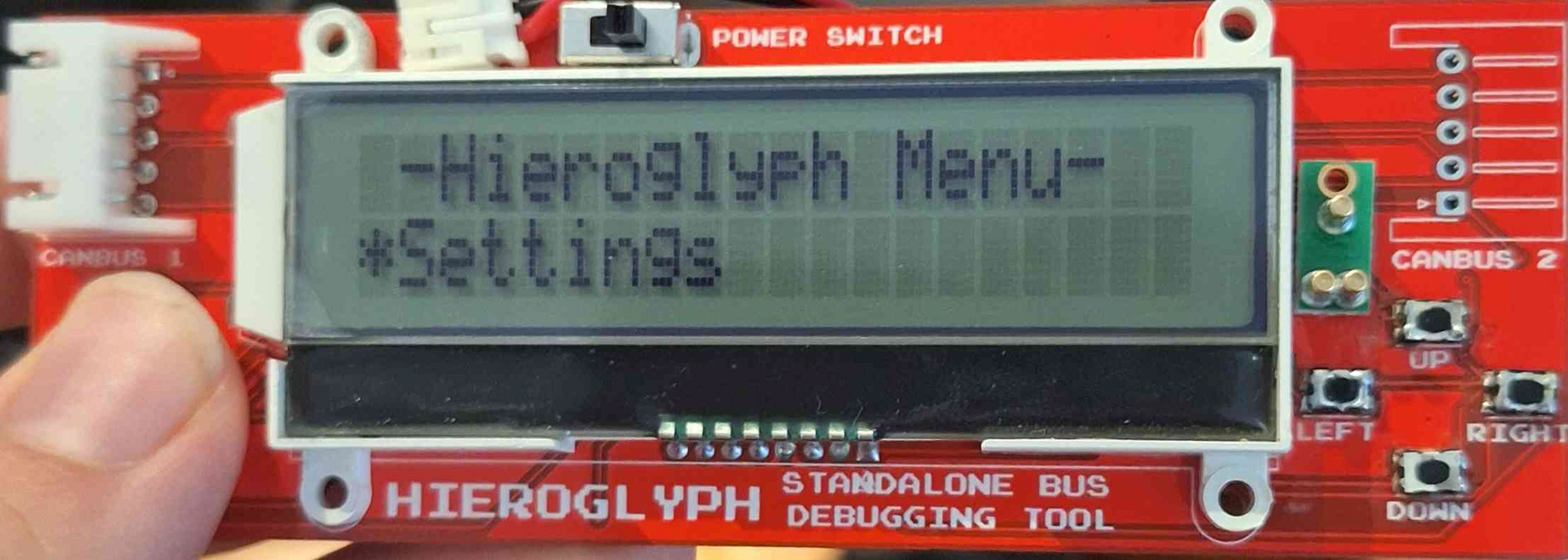
For testing applications, Papyrus needed the ability to be debugged in the field. A standalone CAN bus connected debugging device rounds out the Papyrus toolkit, using a battery and an LCD screen to expose device functions.